
机器人电机控制中为什么选择FOC而不是无刷电机
2020/6/12 14:30:19 点击:
本文所述的机器人为服务机器人或是载重机器人(仓储机器人、物流机器人);机器人电机控制指的是驱动机器人行走、移动的电机控制。

这种驱动机器人行走的电机一般功率在30~600W,24~48V电池供电,要求寿命长,效率高,运行平稳,安静,响应快,一定范围内负载可变。
本文探讨以下2个问题:
为什么选择无刷电机
为什么选择FOC控制
1、为什么选择无刷电机
常见的电机有步进电机、异步电机、有刷电机、无刷电机、伺服电机。
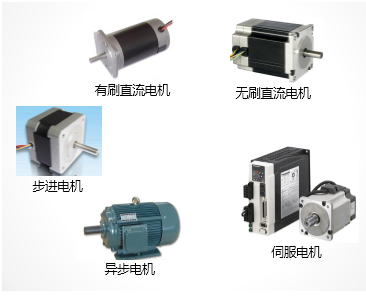
步进电机
价格较低,控制简单,开环控制精度高,一般用在小力矩中低转速需定位的场合,如3D打印、小型机器人。由于力矩小且动态性能差,不适用于服务机器人和载重机器人。
异步电机
价格较低,可以不需要控制器,效率低,一般用在交流电供电场合,如传统风扇。不适用于电池供电的机器人。
有刷电机
价格较低,控制简单,碳刷易坏,一般用在小电流低成本场合,如玩具车、小型机器人。在服务机器人和载重机器人中,由于电流大,碳刷易坏,往往不使用。
无刷电机
价格较高,控制复杂,无碳刷,寿命长,力矩波动小,动态响应好,一般用在稍大电流要求高的场合,如无人机、电动自行车、机器人。
伺服电机
价格昂贵,控制复杂,力矩波动最小,一般用在定位响应快要求高的场合,如数控机床。由于机器人行走一般不需要精度非常高的位置控制,所以也比较少选择昂贵的伺服电机。
综上所述,无刷电机拥有步进电机和有刷电机难以企及的优点,在无刷电机性能满足的情况下,一般也不使用价格昂贵的伺服电机。因此,无刷电机在机器人中被广泛使用。
2、为什么选择FOC控制
www.szkingfrom.com
无刷电机最常用的控制方式有3种:方波控制、正弦电压控制、FOC控制,这3种控制方式电机相电流波形如下:
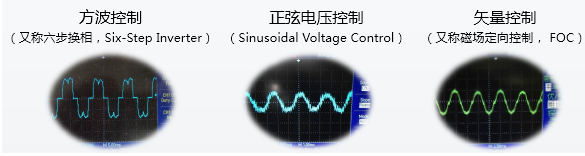
方波控制
电流波动大、控制精度差,噪声大,算法简单,适用于成本敏感、性能要求低的场合。在变负载、动态响应快的机器人中效果不好。
电压正弦控制
电压正弦、控制精度差,噪声小,算法略复杂、适用于成本敏感、对噪声要求不高的场合。同样在变负载、动态响应快的机器人中效果不好。
FOC控制
电流正弦、控制精度比方波控制和电压正弦控制高20倍以上,噪声最小,控制多样化,算法复杂,适用于性能要求高的场合。非常合适应用在服务机器人和载重机器人中。
在服务机器人和载重机器人行走驱动中,无刷电机成为最广泛的选择,而FOC成为无刷电机最合适的控制技术。
这种驱动机器人行走的电机一般功率在30~600W,24~48V电池供电,要求寿命长,效率高,运行平稳,安静,响应快,一定范围内负载可变。
本文探讨以下2个问题:
为什么选择无刷电机
为什么选择FOC控制
1、为什么选择无刷电机
常见的电机有步进电机、异步电机、有刷电机、无刷电机、伺服电机。
步进电机
价格较低,控制简单,开环控制精度高,一般用在小力矩中低转速需定位的场合,如3D打印、小型机器人。由于力矩小且动态性能差,不适用于服务机器人和载重机器人。
异步电机
价格较低,可以不需要控制器,效率低,一般用在交流电供电场合,如传统风扇。不适用于电池供电的机器人。
有刷电机
价格较低,控制简单,碳刷易坏,一般用在小电流低成本场合,如玩具车、小型机器人。在服务机器人和载重机器人中,由于电流大,碳刷易坏,往往不使用。
无刷电机
价格较高,控制复杂,无碳刷,寿命长,力矩波动小,动态响应好,一般用在稍大电流要求高的场合,如无人机、电动自行车、机器人。
伺服电机
价格昂贵,控制复杂,力矩波动最小,一般用在定位响应快要求高的场合,如数控机床。由于机器人行走一般不需要精度非常高的位置控制,所以也比较少选择昂贵的伺服电机。
综上所述,无刷电机拥有步进电机和有刷电机难以企及的优点,在无刷电机性能满足的情况下,一般也不使用价格昂贵的伺服电机。因此,无刷电机在机器人中被广泛使用。
2、为什么选择FOC控制
www.szkingfrom.com
无刷电机最常用的控制方式有3种:方波控制、正弦电压控制、FOC控制,这3种控制方式电机相电流波形如下:
方波控制
电流波动大、控制精度差,噪声大,算法简单,适用于成本敏感、性能要求低的场合。在变负载、动态响应快的机器人中效果不好。
电压正弦控制
电压正弦、控制精度差,噪声小,算法略复杂、适用于成本敏感、对噪声要求不高的场合。同样在变负载、动态响应快的机器人中效果不好。
FOC控制
电流正弦、控制精度比方波控制和电压正弦控制高20倍以上,噪声最小,控制多样化,算法复杂,适用于性能要求高的场合。非常合适应用在服务机器人和载重机器人中。
在服务机器人和载重机器人行走驱动中,无刷电机成为最广泛的选择,而FOC成为无刷电机最合适的控制技术。
- 上一篇:无刷直流电机常用控制方式对比 2020/6/12
- 下一篇:瑞联新材成功着陆科创板,募资10.52亿发展各类显示材料等 2020/6/11
